
Supply: OpenAI’s DALL·E 2 with immediate “a hyperrealistic image of a robotic studying the information on a laptop computer at a espresso store”
Welcome to the 4th version of Robo-Perception, a biweekly robotics information replace! On this put up, we’re excited to share a spread of latest developments within the discipline and spotlight robots’ progress in areas like cellular purposes, cleansing, underwater mining, flexibility, human well-being, melancholy therapies, and human interactions.
Simplified cellular robotic habits variations
On the earth of system adaptions, researchers from Eindhoven College of Know-how have launched a technique that bridges the hole between software builders and management engineers within the context of cellular robots’ habits adaptation. This strategy leverages symbolic descriptions of robots’ habits, often called “habits semantics,” and interprets them into management actions via a “semantic map.” This innovation goals to simplify movement management programming for autonomous cellular robotic purposes and facilitate integration throughout varied distributors’ management software program. By establishing a structured interplay layer between software, interplay, and management layers, this technique may streamline the complexity of cellular robotic purposes, doubtlessly resulting in extra environment friendly underground exploration and navigation techniques.
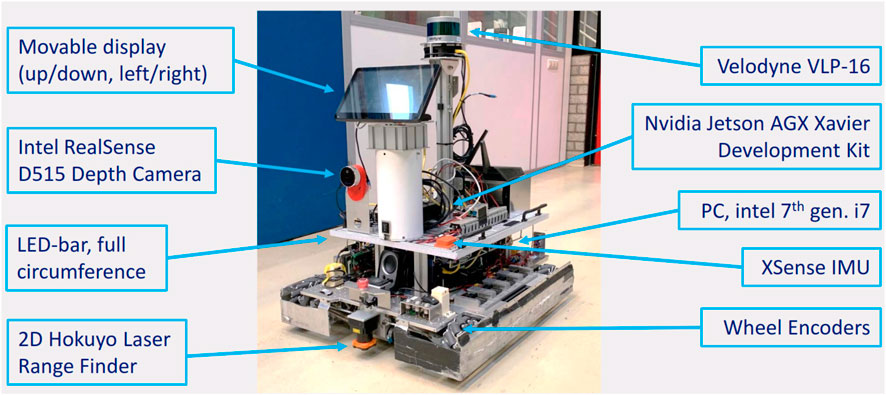
The frontal perspective of the cellular platform (showcases {hardware} elements with blue arrows). Supply.
New robotic for family clean-ups
Talking of useful robots, Princeton College has created a robotic named TidyBot to handle the problem of family tidying. Not like easy duties akin to shifting objects, real-world cleanup requires a robotic to distinguish between objects, place them accurately, and keep away from damaging them. TidyBot accomplishes this via a mixture of bodily dexterity, visible recognition, and language understanding. Geared up with a cellular robotic arm, a imaginative and prescient mannequin, and a language mannequin, TidyBot can establish objects, place them in designated places, and even infer correct actions with an 85% accuracy charge. The success of TidyBot demonstrates its potential to deal with complicated family duties.
TidyBot in work. Supply.
Deep sea mining robots
Shifting our focus to underwater environments, researchers are addressing the effectivity hurdles confronted in deep-sea mining via progressive path planning for autonomous robotic mining automobiles. With deep-sea manganese nodules holding important potential, these robotic automobiles are important for his or her assortment. By refining path planning strategies, the researchers goal to enhance the effectivity of those automobiles in traversing difficult underwater terrains whereas avoiding obstacles. This improvement may result in more practical and accountable useful resource extraction from the ocean flooring, contributing to the sustainable utilization of priceless mineral assets.
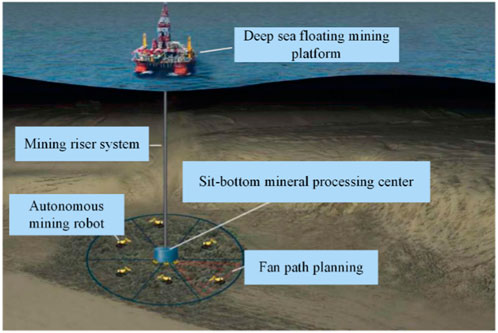
Diagram depicting the operational framework of the deep-sea mining system. Supply.
Superior tender robots with dexterity and suppleness
Regarding the discipline of robotic movement, just lately researchers from Shanghai Jiao Tong College have developed small-scale tender robots with exceptional dexterity, enabling speedy and reversible adjustments in movement route and form reconfiguration. These robots, powered by an lively dielectric elastomer synthetic muscle and a singular chiral-lattice foot design, can change route throughout quick motion with a single voltage enter. The chiral-lattice foot generates varied locomotion behaviors, together with ahead, backward, and round movement, by adjusting voltage frequencies. Moreover, combining this structural design with form reminiscence supplies permits the robots to carry out complicated duties like navigating slim tunnels or forming particular trajectories. This innovation opens the door to next-generation autonomous tender robots able to versatile locomotion.
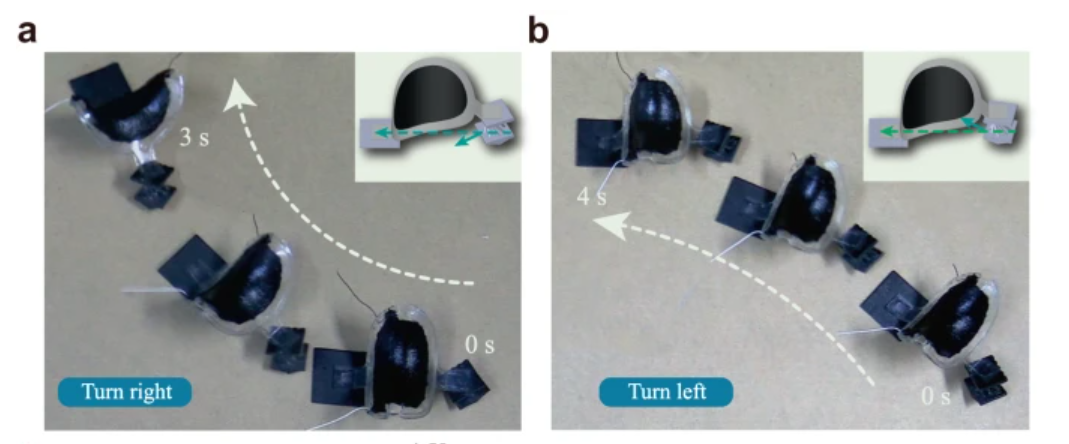
The tender robotic achieves round movement in both proper or left instructions by positioning the lattice foot in the direction of the respective sides. Supply.
Robotic canines utilized to consolation sufferers
Turning our focus to robotic use within the healthcare discipline, Stanford college students, together with researchers and medical doctors, have partnered with AI and robotics business leaders to showcase new robotic canines designed to work together with pediatric sufferers at Lucile Packard Kids’s Hospital. Sufferers on the hospital had the chance to have interaction with the playful robots, demonstrating the potential advantages of those mechanical pets for kids’s well-being throughout their hospital stays. The robots, known as Pupper, have been developed by undergraduate engineering college students and operated utilizing handheld controllers. The purpose of the demonstration was to review the interplay between the robots and pediatric sufferers, exploring methods to reinforce the medical expertise and cut back nervousness.

A affected person taking part in with the robotic canine. Supply.
Robotic improvements may assist with melancholy
Alongside the identical traces as bettering well-being, a current pilot examine has explored the potential advantages of utilizing robotics in transcranial magnetic stimulation (TMS) for treating melancholy. Researchers led by Hyunsoo Shin developed a customized TMS robotic designed to enhance the accuracy of TMS coil placement on the mind, a vital facet of efficient remedy. By using the robotic system, they diminished preparation time by 53% and considerably minimized errors in coil positioning. The examine discovered comparable therapeutic results on melancholy severity and regional cerebral blood circulate (rCBF) between the robotic and guide TMS strategies, shedding mild on the potential of robotic help in enhancing the precision and effectivity of TMS therapies.
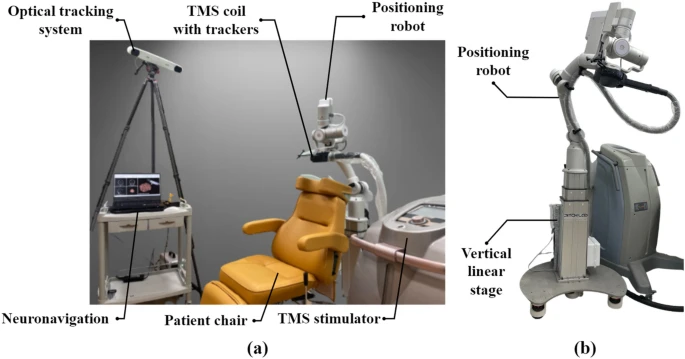
Configuration of the robotic repetitive transcranial magnetic stimulation (rTMS) throughout the remedy facility, and robotic positioning system for automated coil placement. Supply.
Superior robotic eye analysis
Lastly, on this planet of human-robot enhancement, a examine performed by researchers from varied establishments has explored the potential of utilizing robotic eyes as predictive cues in human-robot interplay (HRI). The examine aimed to know whether or not and the way the design of predictive robotic eyes may improve interactions between people and robots. 4 several types of eye designs have been examined, together with arrows, human eyes, and two anthropomorphic robotic eye designs. The outcomes indicated that summary anthropomorphic robotic eyes, which mimic sure features of human-like consideration, have been best at directing contributors’ consideration and triggering reflexive shifts. These findings recommend that incorporating summary anthropomorphic eyes into robotic design may enhance the predictability of robotic actions and improve HRI.
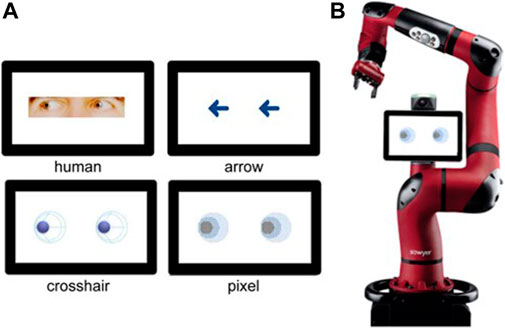
The 4 forms of stimuli. The primary row showcases the human (left) and arrow (proper) stimuli. The second row shows the summary anthropomorphic robotic eyes. {Photograph} of the questionnaire’s topic, the cooperative robotic Sawyer. Supply.
The continual stream of progress seen throughout various domains underscores the adaptable and always progressing nature of robotics know-how, revealing novel pathways for its incorporation throughout a spectrum of industries. The gradual development within the realm of robotics displays persistent efforts and hints on the potential implications these strides would possibly maintain for the long run.
Sources:
- Chen, H. L., Hendrikx, B., Torta, E., Bruyninckx, H., & van de Molengraft, R. (2023, July 10). Habits adaptation for cellular robots through semantic map compositions of constraint-based controllers. Frontiers.
- Princeton Engineering – Engineers clear up with TidyBot. (n.d.). Princeton Engineering. Retrieved August 30, 2023,
- Xie, Y., Liu, C., Chen, X., Liu, G., Leng, D., Pan, W., & Shao, S. (2023, July 12). Analysis on path planning of autonomous manganese nodule mining automobile primarily based on lifting mining system. Frontiers.
- Wang, D., Zhao, B., Li, X., Dong, L., Zhang, M., Zou, J., & Gu, G. (2023). Dexterous electrical-driven tender robots with reconfigurable chiral-lattice foot design. Nature Communications, 14(1), 5067.
- College, S. (2023, August 1). Robo-dogs unleash pleasure at Stanford hospital. Stanford Report.
- Shin, H., Jeong, H., Ryu, W., Lee, G., Lee, J., Kim, D., Music, I.-U., Chung, Y.-A., & Lee, S. (2023). Robotic transcranial magnetic stimulation within the remedy of melancholy: a pilot examine. Scientific Reviews, 13(1), 14074.
- Onnasch, L., Schweidler, P., & Schmidt, H. (2023, July 3). The potential of robotic eyes as predictive cues in HRI-an eye-tracking examine. Frontiers.

Shaunak Kapur
is a part of Robohub’s volunteering staff, and soon-to-be senior in highschool (Texas). Shaun has been captivated by robotics from a younger age.
Shaunak Kapur
is a part of Robohub’s volunteering staff, and soon-to-be senior in highschool (Texas). Shaun has been captivated by robotics from a younger age.