

MIT researchers have developed a camera-based contact sensor that’s lengthy, curved, and formed like a human finger. Their gadget, which gives high-resolution tactile sensing over a big space, might allow a robotic hand to carry out a number of kinds of grasps. Picture: Courtesy of the researchers
By Adam Zewe | MIT Information
Think about greedy a heavy object, like a pipe wrench, with one hand. You’d probably seize the wrench utilizing your total fingers, not simply your fingertips. Sensory receptors in your pores and skin, which run alongside your complete size of every finger, would ship info to your mind concerning the device you’re greedy.
In a robotic hand, tactile sensors that use cameras to acquire details about grasped objects are small and flat, so they’re typically positioned within the fingertips. These robots, in flip, use solely their fingertips to know objects, sometimes with a pinching movement. This limits the manipulation duties they’ll carry out.
MIT researchers have developed a camera-based contact sensor that’s lengthy, curved, and formed like a human finger. Their gadget gives high-resolution tactile sensing over a big space. The sensor, known as the GelSight Svelte, makes use of two mirrors to mirror and refract gentle in order that one digicam, positioned within the base of the sensor, can see alongside your complete finger’s size.
As well as, the researchers constructed the finger-shaped sensor with a versatile spine. By measuring how the spine bends when the finger touches an object, they’ll estimate the drive being positioned on the sensor.
They used GelSight Svelte sensors to supply a robotic hand that was in a position to grasp a heavy object like a human would, utilizing your complete sensing space of all three of its fingers. The hand might additionally carry out the identical pinch grasps frequent to conventional robotic grippers.

This gif exhibits a robotic hand that includes three, finger-shaped GelSight Svelte sensors. The sensors, which offer high-resolution tactile sensing over a big space, allow the hand to carry out a number of grasps, together with pinch grasps that use solely the fingertips and an influence grasp that makes use of your complete sensing space of all three fingers. Credit score: Courtesy of the researchers
“As a result of our new sensor is human finger-shaped, we will use it to do various kinds of grasps for various duties, as a substitute of utilizing pinch grasps for all the pieces. There’s solely a lot you are able to do with a parallel jaw gripper. Our sensor actually opens up some new potentialities on completely different manipulation duties we might do with robots,” says Alan (Jialiang) Zhao, a mechanical engineering graduate scholar and lead creator of a paper on GelSight Svelte.
Zhao wrote the paper with senior creator Edward Adelson, the John and Dorothy Wilson Professor of Imaginative and prescient Science within the Division of Mind and Cognitive Sciences and a member of the Pc Science and Synthetic Intelligence Laboratory (CSAIL). The analysis will likely be introduced on the IEEE Convention on Clever Robots and Programs.
Mirror mirror
Cameras utilized in tactile sensors are restricted by their measurement, the focal distance of their lenses, and their viewing angles. Subsequently, these tactile sensors are typically small and flat, which confines them to a robotic’s fingertips.
With an extended sensing space, one which extra carefully resembles a human finger, the digicam would wish to take a seat farther from the sensing floor to see your complete space. That is notably difficult attributable to measurement and form restrictions of a robotic gripper.
Zhao and Adelson solved this drawback utilizing two mirrors that mirror and refract gentle towards a single digicam positioned on the base of the finger.
GelSight Svelte incorporates one flat, angled mirror that sits throughout from the digicam and one lengthy, curved mirror that sits alongside the again of the sensor. These mirrors redistribute gentle rays from the digicam in such a method that the digicam can see the alongside your complete finger’s size.
To optimize the form, angle, and curvature of the mirrors, the researchers designed software program to simulate reflection and refraction of sunshine.
“With this software program, we will simply mess around with the place the mirrors are positioned and the way they’re curved to get a way of how nicely the picture will take care of we truly make the sensor,” Zhao explains.
The mirrors, digicam, and two units of LEDs for illumination are connected to a plastic spine and encased in a versatile pores and skin produced from silicone gel. The digicam views the again of the pores and skin from the within; based mostly on the deformation, it could possibly see the place contact happens and measure the geometry of the thing’s contact floor.
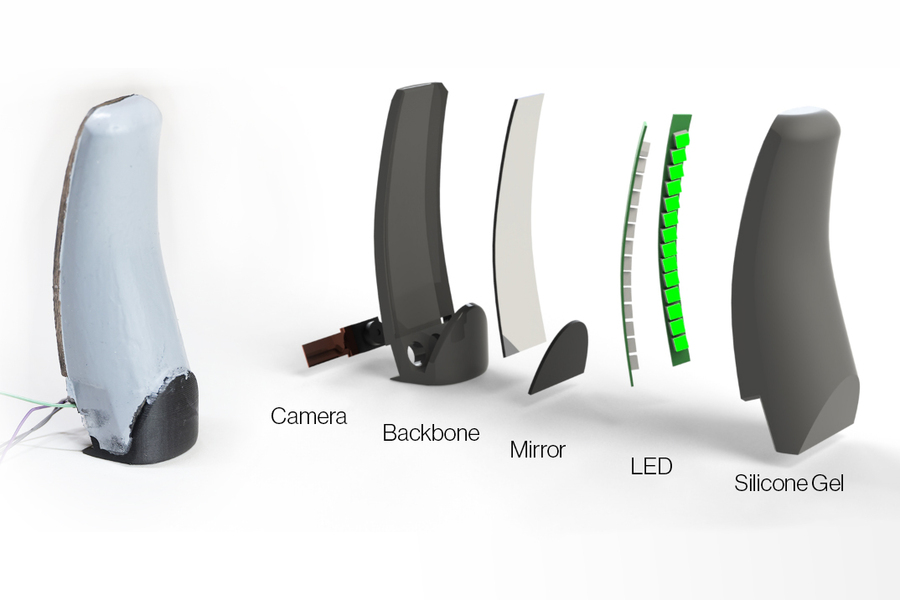
A breakdown of the elements that make up the finger-like contact sensor. Picture: Courtesy of the researchers
As well as, the purple and inexperienced LED arrays give a way of how deeply the gel is being pressed down when an object is grasped, because of the saturation of shade at completely different areas on the sensor.
The researchers can use this shade saturation info to reconstruct a 3D depth picture of the thing being grasped.
The sensor’s plastic spine allows it to find out proprioceptive info, such because the twisting torques utilized to the finger. The spine bends and flexes when an object is grasped. The researchers use machine studying to estimate how a lot drive is being utilized to the sensor, based mostly on these spine deformations.
Nevertheless, combining these components right into a working sensor was no simple job, Zhao says.
“Ensuring you’ve got the proper curvature for the mirror to match what we’ve in simulation is fairly difficult. Plus, I noticed there are some sorts of superglue that inhibit the curing of silicon. It took plenty of experiments to make a sensor that truly works,” he provides.
Versatile greedy
As soon as that they had perfected the design, the researchers examined the GelSight Svelte by urgent objects, like a screw, to completely different areas on the sensor to test picture readability and see how nicely it might decide the form of the thing.
In addition they used three sensors to construct a GelSight Svelte hand that may carry out a number of grasps, together with a pinch grasp, lateral pinch grasp, and an influence grasp that makes use of your complete sensing space of the three fingers. Most robotic fingers, that are formed like parallel jaw drippers, can solely carry out pinch grasps.
A 3-finger energy grasp allows a robotic hand to carry a heavier object extra stably. Nevertheless, pinch grasps are nonetheless helpful when an object could be very small. Having the ability to carry out each kinds of grasps with one hand would give a robotic extra versatility, he says.
Shifting ahead, the researchers plan to reinforce the GelSight Svelte so the sensor is articulated and may bend on the joints, extra like a human finger.
“Optical-tactile finger sensors permit robots to make use of cheap cameras to gather high-resolution pictures of floor contact, and by observing the deformation of a versatile floor the robotic estimates the contact form and forces utilized. This work represents an development on the GelSight finger design, with enhancements in full-finger protection and the flexibility to approximate bending deflection torques utilizing picture variations and machine studying,” says Monroe Kennedy III, assistant professor of mechanical engineering at Stanford College, who was not concerned with this analysis. “Bettering a robotic’s sense of contact to method human capability is a necessity and maybe the catalyst drawback for creating robots able to engaged on advanced, dexterous duties.”
This analysis is supported, partly, by the Toyota Analysis Institute.

MIT Information