
Ray is an open-source unified compute framework that simplifies scaling AI and Python workloads in a distributed surroundings. Since we launched help for operating Ray on Databricks, we have witnessed quite a few clients efficiently deploying their machine studying use circumstances, which vary from forecasting and deep reinforcement studying to fine-tuning LLMs.
With the discharge of Ray model 2.8.0, we’re delighted to announce the addition of autoscaling help for Ray on Databricks. Autoscaling is crucial as a result of it permits sources to dynamically modify to fluctuating calls for. This ensures optimum efficiency and cost-efficiency, as processing wants can range considerably over time, and it helps keep a stability between computational energy and bills with out requiring handbook intervention.
Ray autoscaling on Databricks can add or take away employee nodes as wanted, leveraging the Spark framework to reinforce scalability, cost-effectiveness, and responsiveness in distributed computing environments. This built-in method is much easier than the choice of implementing OSS autoscaling by eliminating the necessity for outlining complicated permissions, cloud initialization scripts, and logging configurations. With a fully-managed, production-capable, and built-in autoscaling resolution, you possibly can tremendously cut back the complexity and value of your Ray workloads.
Create Ray cluster on Databricks with autoscaling enabled
To get began, merely set up the most recent model of Ray
# Set up Ray with the 'default','tune' extensions for
# Ray dashboard, and tuning help
%pip set up ray[default,tune]>=2.8.0The subsequent step is to determine the configuration for the Ray cluster that we’ll be beginning by utilizing the `ray.util.spark.setup_ray_cluster() ` operate. With a purpose to leverage autoscaling performance, specify the utmost variety of employee nodes that the Ray cluster can use, outline the allotted compute sources, and set the Autoscale flag to True. Moreover, it’s essential to make sure that the Databricks cluster has been began with autoscaling enabled. For extra particulars, please check with the documentation.
As soon as these parameters have been set, if you initialize the Ray cluster, autoscaling will operate precisely as Databricks autoscaling does. Beneath is an instance of establishing a Ray cluster with the flexibility to autoscale.
from ray.util.spark import setup_ray_cluster
setup_ray_cluster(
num_worker_nodes,#set to max variety of nodes to Autoscale
num_cpus_head_node,# set to the cores used within the driver node
num_gpus_head_node, # set for GPU enabled cluster
num_cpus_per_node,# cores added from every employee node
num_gpus_per_node, #set for GPU enabled cluster
autoscale = True #set just for clusters with Auto Scaling Enabled
)This characteristic is suitable with any Databricks cluster operating Databricks Runtime model 14.0 or above.
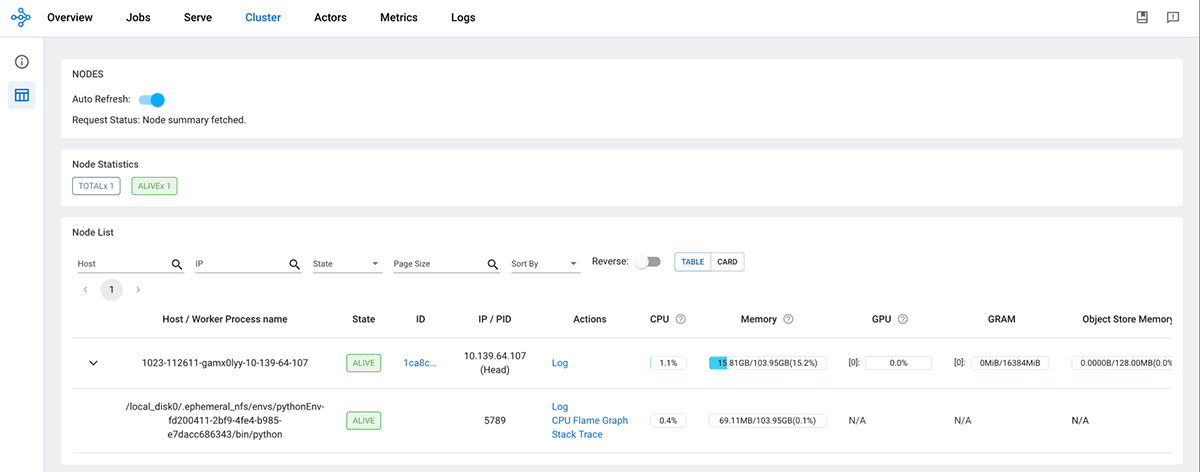
To study extra concerning the parameters which might be accessible for configuring a Ray cluster on Spark, please check with the setup_ray_cluster documentation. As soon as the Ray cluster is initialized, the Ray head node will present up on the Ray Dashboard.
from ray.util.spark import setup_ray_cluster, shutdown_ray_cluster
ray_conf = setup_ray_cluster(
num_worker_nodes= 4,
num_cpus_head_node=3,
num_cpus_per_node=4,
autoscale = True
)
When a job is submitted to the Ray cluster, the Ray Autoscaler API requests sources from the Spark cluster by submitting duties with the mandatory CPU and GPU compute necessities. The Spark scheduler scales up employee nodes if the present cluster sources can not meet the duty’s compute calls for and scales down the cluster when duties are accomplished and no further duties are pending. You’ll be able to management the scale-up and scale-down velocity by adjusting the autoscale_upscaling_speed and autoscale_idle_timeout_minutes parameters. For extra particulars about these management parameters, please check with the documentation. As soon as the method is accomplished, Ray releases the entire allotted sources again to the Spark cluster for different duties or for downscaling, making certain environment friendly utilization of sources.
Let’s stroll by way of a hyperparameter tuning instance to reveal the autoscaling course of. On this instance, we’ll practice a PyTorch mannequin on the CIFAR10 dataset. We have tailored the code from the Ray documentation, which you’ll find right here.
We’ll start by defining the PyTorch mannequin we need to tune.
import torch.nn as nn
import torch.nn.practical as F
class Web(nn.Module):
def __init__(self, l1=120, l2=84):
tremendous(Web, self).__init__()
self.conv1 = nn.Conv2d(3, 6, 5)
self.pool = nn.MaxPool2d(2, 2)
self.conv2 = nn.Conv2d(6, 16, 5)
self.fc1 = nn.Linear(16 * 5 * 5, l1)
self.fc2 = nn.Linear(l1, l2)
self.fc3 = nn.Linear(l2, 10)
def ahead(self, x):
x = self.pool(F.relu(self.conv1(x)))
x = self.pool(F.relu(self.conv2(x)))
x = x.view(-1, 16 * 5 * 5)
x = F.relu(self.fc1(x))
x = F.relu(self.fc2(x))
x = self.fc3(x)
return xWe wrap the info loaders in their very own operate and move a worldwide knowledge listing. This manner we will share an information listing between completely different trials.
import torchvision
import torchvision.transforms as transforms
from filelock import FileLock
def load_data(data_dir="./knowledge"):
rework = transforms.Compose(
[transforms.ToTensor(), transforms.Normalize((0.5, 0.5, 0.5), (0.5, 0.5, 0.5))]
)
# We add FileLock right here as a result of a number of staff will need to
# obtain knowledge, and this may increasingly trigger overwrites since
# DataLoader will not be threadsafe.
with FileLock(os.path.expanduser("~/.knowledge.lock")):
trainset = torchvision.datasets.CIFAR10(
root=data_dir, practice=True, obtain=True, rework=rework
)
testset = torchvision.datasets.CIFAR10(
root=data_dir, practice=False, obtain=True, rework=rework
)
return trainset, testsetSubsequent, we will outline a operate that can ingest a config and run a single coaching loop for the torch mannequin. On the conclusion of every trial, we checkpoint the weights and report the evaluated loss utilizing the `practice, report` API. That is performed in order that the scheduler can cease ineffectual trials that don’t enhance the mannequin’s loss traits.
import os
import torch
import torch.optim as optim
from torch.utils.knowledge import random_split
import ray
from ray import practice, tune
from ray.practice import Checkpoint
def train_cifar(config, loc): # location to retailer the checkpoints
internet = Web(config["l1"], config["l2"])
# test whether or not to load in CPU or GPU
machine = "cpu"
if torch.cuda.is_available():
machine = "cuda:0"
internet.to(machine)
criterion = nn.CrossEntropyLoss()
optimizer = optim.SGD(internet.parameters(), lr=config["lr"], momentum=0.9)
# load the Dataset
data_dir = os.path.abspath("./knowledge")
trainset, testset = load_data(data_dir)
test_abs = int(len(trainset) * 0.8)
train_subset, val_subset = random_split(
trainset, [test_abs, len(trainset) - test_abs]
)
trainloader = torch.utils.knowledge.DataLoader(
train_subset, batch_size=int(config["batch_size"]), shuffle=True, num_workers=8
)
valloader = torch.utils.knowledge.DataLoader(
val_subset, batch_size=int(config["batch_size"]), shuffle=True, num_workers=8
)Subsequent, we outline the coaching loop which runs for the whole epochs specified within the config file, Every epoch consists of two major elements:
- The Prepare Loop – iterates over the coaching dataset and tries to converge to optimum parameters.
- The Validation/Check Loop – iterates over the check dataset to test if mannequin efficiency is bettering.
for epoch in vary(config["max_epoch"]): # loop over the dataset a number of occasions
running_loss = 0.0
epoch_steps = 0
for i, knowledge in enumerate(trainloader, 0):
# get the inputs; knowledge is an inventory of [inputs, labels]
inputs, labels = knowledge
inputs, labels = inputs.to(machine), labels.to(machine)
# zero the parameter gradients
optimizer.zero_grad()
# ahead + backward + optimize
outputs = internet(inputs)
loss = criterion(outputs, labels)
loss.backward()
optimizer.step()
# print statistics
running_loss += loss.merchandise()
epoch_steps += 1
if i % 2000 == 1999: # print each 2000 mini-batches
print(
"[%d, %5d] loss: %.3f" % (epoch + 1, i + 1, running_loss / epoch_steps)
)
running_loss = 0.0
# Validation loss
val_loss = 0.0
val_steps = 0
complete = 0
appropriate = 0
for i, knowledge in enumerate(valloader, 0):
with torch.no_grad():
inputs, labels = knowledge
inputs, labels = inputs.to(machine), labels.to(machine)
outputs = internet(inputs)
_, predicted = torch.max(outputs.knowledge, 1)
complete += labels.dimension(0)
appropriate += (predicted == labels).sum().merchandise()
loss = criterion(outputs, labels)
val_loss += loss.cpu().numpy()
val_steps += 1Lastly, we first save a checkpoint after which report some metrics again to Ray Tune. Particularly, we ship the validation loss and accuracy again to Ray Tune. Ray Tune can then use these metrics to determine which hyperparameter configuration results in the perfect outcomes.
# Right here we save a checkpoint. It's robotically registered with
# Ray Tune and will be accessed by way of `practice.get_checkpoint()`
# API in future iterations.
import os
import torch
import ray
from ray import practice
from ray.practice import Checkpoint
os.makedirs(f"{loc}/mymodel", exist_ok=True)
torch.save((internet.state_dict(), optimizer.state_dict()), f"{loc}/mymodel/checkpoint.pt")
checkpoint = Checkpoint.from_directory(f"{loc}/mymodel/")
practice.report(
{"loss": (val_loss / val_steps), "try_gpu": False, "accuracy": appropriate / complete},
checkpoint=checkpoint,
)
print("Completed Coaching")Subsequent, we outline the principle parts to begin the tuning job by specifying the search house that the optimizer will choose from for given hyperparameters.
Outline the search house
The configuration under expresses the hyperparameters and their search choice ranges as a dictionary. For every of the given parameter sorts, we use the suitable selector algorithm (i.e., sample_from, loguniform, or alternative, relying on the character of the parameter being outlined).
from ray import tune
config = {
"l1": tune.sample_from(lambda _: 2 ** np.random.randint(2, 9)),
"l2": tune.sample_from(lambda _: 2 ** np.random.randint(2, 9)),
"lr": tune.loguniform(1e-4, 1e-1),
"batch_size": tune.alternative([2, 4, 8, 16]),
"max_epoch":20
}At every trial, Ray Tune will randomly pattern a mix of parameters from these search areas. After choosing a price for every of the parameters inside the confines of our configuration that we outlined above, it’s going to then practice quite a few fashions in parallel with the intention to discover the best-performing one among the many group. With a purpose to short-circuit an iteration of parameter choice that is not working effectively, we use the ASHAScheduler, which is able to terminate ineffective trials early i.e. trials whose loss metrics are considerably degraded in comparison with the present best-performing set of parameters from the run’s historical past.
from ray.tune.schedulers import ASHAScheduler
scheduler = ASHAScheduler(
max_t=config['max_epoch'],
grace_period=5,
reduction_factor=2
)Tune API
Lastly, we name the Tuner API to provoke the run. When calling the coaching initiating technique, we move some further configuration choices that outline the sources that we allow Ray Tune to make use of per trial, the default storage location of checkpoints, and the goal metric to optimize throughout the iterative optimization. Refer right here for extra particulars on the varied parameters which might be accessible for Ray Tune.
import os
from ray import practice, tune
tuner = tune.Tuner(
tune.with_resources(
tune.with_parameters(train_cifar, loc=loc),
sources={"cpu": cpus_per_trial, "gpu": gpus_per_trial},
),
tune_config=tune.TuneConfig(
metric="loss",
mode="min",
scheduler=scheduler,
num_samples=num_samples, # complete trails to run given the search house
),
run_config=practice.RunConfig(
storage_path=os.path.expanduser(loc), identify="tune_checkpointing_location"
),
param_space=config,
)
outcomes = tuner.match()With a purpose to see what occurs once we run this code with a particular declared useful resource constraint, let’s set off the run with CPU solely, utilizing cpus_per_trial = 3 and gpu = 0 with total_epochs = 20 for the run configuration.
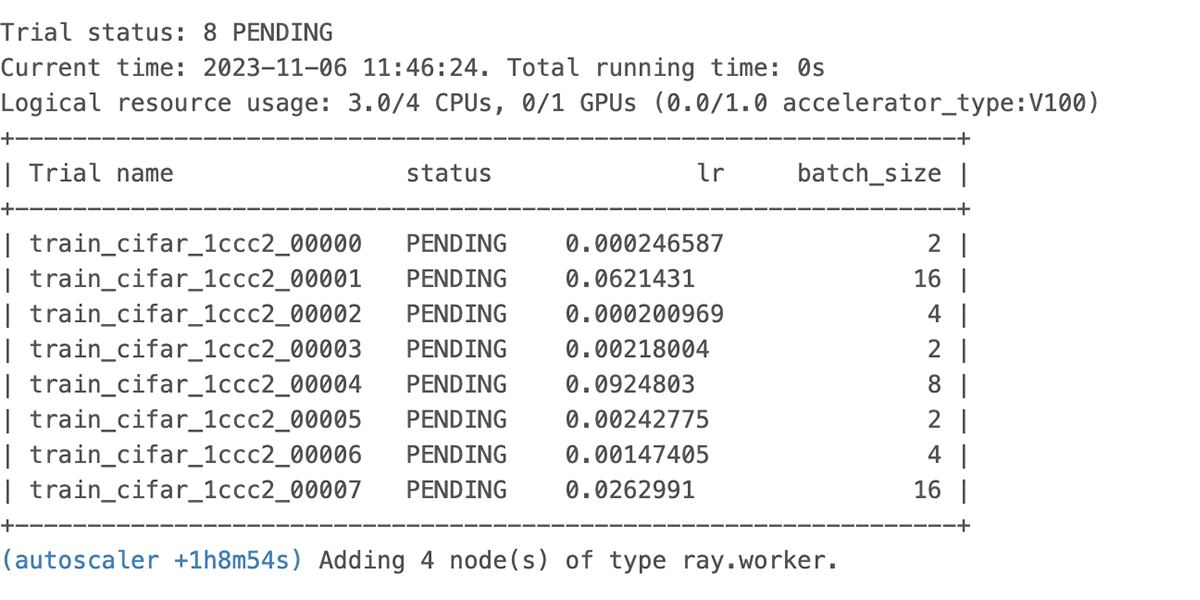
We see the autoscaler begin requesting sources as proven above and the pending useful resource logged within the UI proven under.
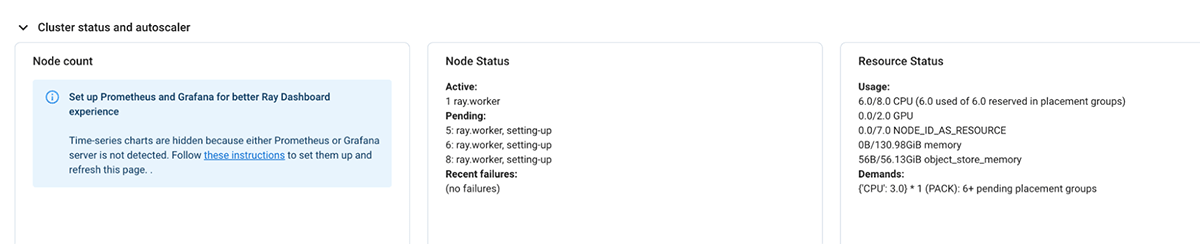
If the present demand for sources by the Ray cluster can’t be met, it initiates autoscaling of the databricks cluster as effectively.

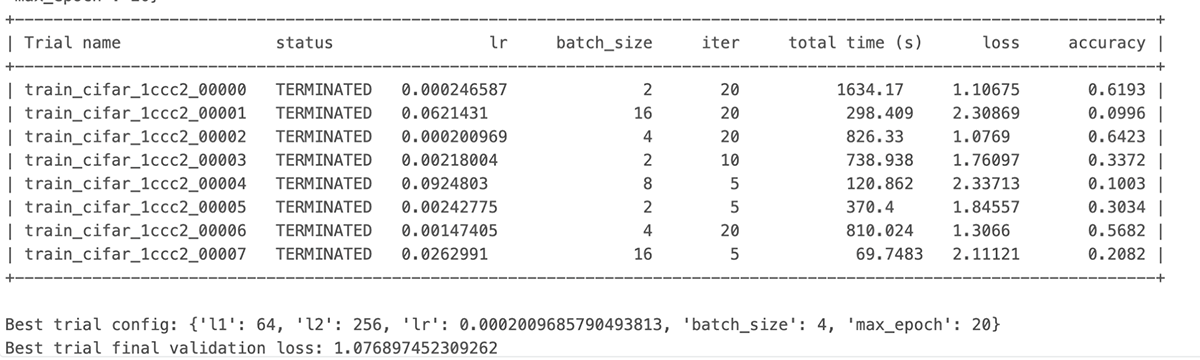
Lastly, we will see the run finishes the output of the Job exhibits that among the dangerous trials have been terminated early resulting in compute financial savings
The identical course of works with none code change with GPU sources as effectively with none code change. Be happy to clone the pocket book and run it in your surroundings:
What’s subsequent
With the help for autoscaling Ray workload, we take one step additional to tighten the combination between Ray and Databricks and assist scale your dynamic workloads. Our roadmap for this integration guarantees much more thrilling developments. Keep tuned for additional updates!