
If you happen to’ve ever confronted the irritating problem of your FPV drone refusing to arm, you’re in the precise place. I’m right here to information you thru troubleshooting and fixing this downside, particularly in case your drone makes use of Betaflight firmware. By understanding what prevents a drone from arming and studying learn how to diagnose and repair these points, you’ll be again within the air very quickly.

New to Betaflight? No worries—right here’s a tutorial to get you began on setting it up for the primary time: https://oscarliang.com/betaflight-firmware-setup/
The First Issues to Verify
Alright, let’s dive into the primary steps to diagnose why your drone isn’t arming.
Unplugging USB Cable
Betaflight has a security characteristic the place your motors received’t spin up if the flight controller is linked to the configurator. So, disconnect the USB and provides it one other go.
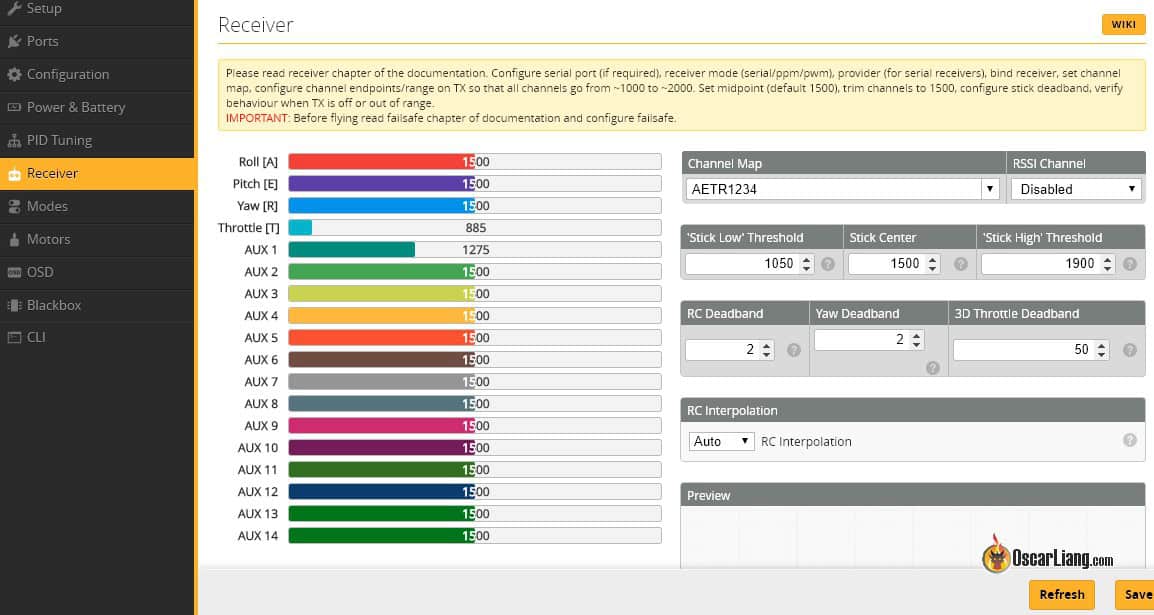
Radio Receiver Verify
Guarantee your radio receiver is sure and dealing accurately in Betaflight. Head over to the receiver tab to see if the channel responses match your stick actions accurately. Oh, and be sure to’ve acquired the most recent Betaflight configurator downloaded: https://oscarliang.com/download-betaflight-configurator/.
Arm Mode Project
Did you assign a change in your radio for ARM mode? It ought to mild up yellow when activated, signaling every thing’s set accurately. Undecided how to do this? See my tutorial on establishing Arm change: https://oscarliang.com/betaflight-modes/#How-to-Setup-Arm-Swap

Nonetheless no luck? Let’s dig a bit deeper.
Verify for Arming Points in Betaflight
OSD
If you happen to’ve acquired Betaflight OSD, allow “Warnings” in your display screen with “Arming Disabled” chosen. It’ll offer you clue on what’s stopping the drone from arming.

You don’t have Betaflight OSD? There are different methods to test for the “Arming Disable Flag” in Betaflight, let me clarify.
Betaflight Configurator
In case you have entry to a pc, you possibly can simply test the Arming Disable Flag within the Setup Tab within the Betaflight configurator.

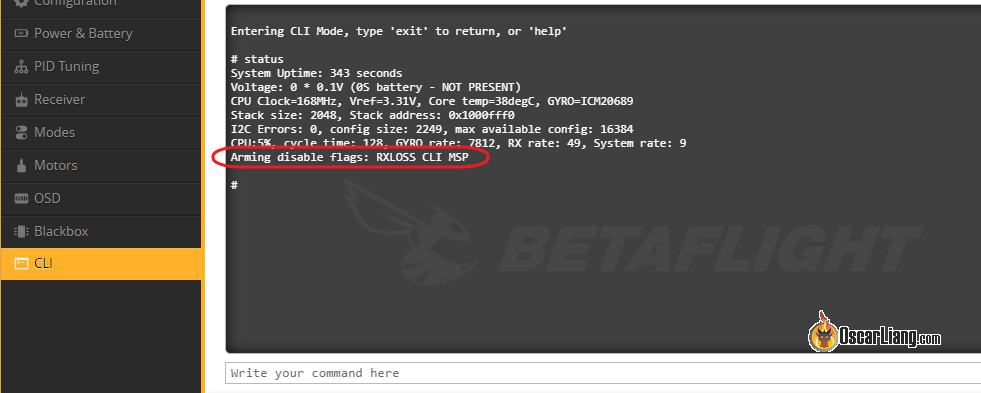
CLI
Alternatively, you possibly can test within the CLI by getting into the command “standing”, the final line is the record of arming prevention flags.
Additional Studying: use CLI in Betaflight?
Buzzer Beeping
If you happen to don’t have a pc, however your quad has a buzzer, the beeping must also point out the disarm flags. Right here’s learn how to decipher the beeping sample:
- 5 quick beeps for simply consideration, which will be ignored
- Plenty of lengthy beeps
- Plenty of quick beeps with lengthy intervals
Every lengthy beep represents 5, whereas every quick beep represents 1. The ultimate flag quantity will be calculated as 5 x <the variety of lengthy beeps> + <the variety of quick beeps>.
For instance:
- 0 lengthy beep and a couple of quick beeps = 2
- 1 lengthy beep and three quick beeps = 8
- 2 lengthy beeps + 0 quick beeps = 10
Arming Prevention Flags Lookup Desk
When you’ve discovered the arming disabled flag numbers or names, match them with this useful desk to decode the problem. The information is from the Betaflight wiki.
| Title | Description | Beep code | Required Actions |
| NOGYRO | A gyro was not detected | 1 | You’ll have a {hardware} failure, if a earlier firmware model works then it could be a firmware problem. Otherwise you might need flashed a fallacious goal. |
| FAILSAFE | Failsafe is lively | 2 | Rectify the failure situation and check out once more. |
| RXLOSS(1) or RX_FAILSAFE | No legitimate receiver sign is detected | 3 | Your receiver is both defective or has no hyperlink to the transmitter. |
| BADRX(1) | Your receiver has simply recovered from receiver failsafe however the arm change is on | 4 | Swap the arm change off. |
| BOXFAILSAFE | The ‘FAILSAFE’ change was activated | 5 | See FAILSAFE |
| RUNAWAY | Runway Takeoff Prevention has been triggered | 6 | Disarm to clear this situation. |
| CRASH | Crash Restoration has been triggered | 7 | Disarm to clear this situation. |
| THROTTLE | Throttle channel is just too excessive | 8 | Decrease throttle under min_check. |
| ANGLE | Craft shouldn’t be stage (sufficient) | 9 | Stage craft to inside small_angle levels (default 25). |
| BOOTGRACE | Arming too quickly after energy on | 10 | Wait till pwr_on_arm_grace seconds (default 5) have elapsed. |
| NOPREARM | Prearm change shouldn’t be activated or prearm has not been toggled after disarm | 11 | Toggle the prearm change. |
| LOAD | System load is just too excessive for secure flight | 12 | Revisit configuration and disable options. |
| CALIB | Sensor calibration remains to be ongoing | 13 | Watch for sensor calibration to finish. |
| CLI | CLI is lively | 14 | Exit the CLI. |
| CMS | CMS (config menu) is Lively – over OSD or different show | 15 | Exit the CMS (or OSD menu). |
| OSD | OSD menu is lively | Exit OSD menu. | |
| BST | A Black Sheep Telemetry gadget (TBS Core Professional for instance) disarmed and is stopping arming | 16 | Check with the handbook on your {hardware}. |
| MSP | MSP connection is lively, most likely through Betaflight Configurator | 17 | Terminate the Betaflight Configurator connection (disconnect). |
| PARALYZE | Paralyze mode has been activated | 18 | Energy cycle/reset FC board. |
| GPS | GPS rescue mode is configured however required variety of satellites has not been mounted | 19 | Watch for GPS repair, allow arming with out GPS repair, or disable GPS rescue mode. |
| RECOVERY | (wiki incomplete) | (wiki incomplete) | (wiki incomplete) |
| RESCUE_SW | GPS Rescue change is in an unsafe place | 20 | Flip off the GPS Rescue change to arm. |
| RPMFILTER(2) | Motor RPM-based filtering shouldn’t be functioning | 21 | A number of ESC’s are usually not supplying legitimate RPM telemetry. |
| REBOOT_REQD | Reboot required | 22 | Reboot the flight controller for settings adjustments to take impact. |
| DSHOT_BBANG | DSHOT Bitbang shouldn’t be working | 23 | (3) |
| NO_ACC_CAL | Accelerometer calibration required | 24 | Calibrate the accelerometer or disable options that use it |
| MOTOR_PROTO | ESC/Motor Protocol not configured | 25 | Choose the ESC/Motor protocol to make use of on the Configuration tab. |
| ARMSWITCH | Arm change is in an unsafe place | 26 | Toggle the arm change to arm. |
Different Widespread Points
If Betaflight reveals no arming disabled flags, the issue could be one thing else. Listed here are a number of extra issues to test:
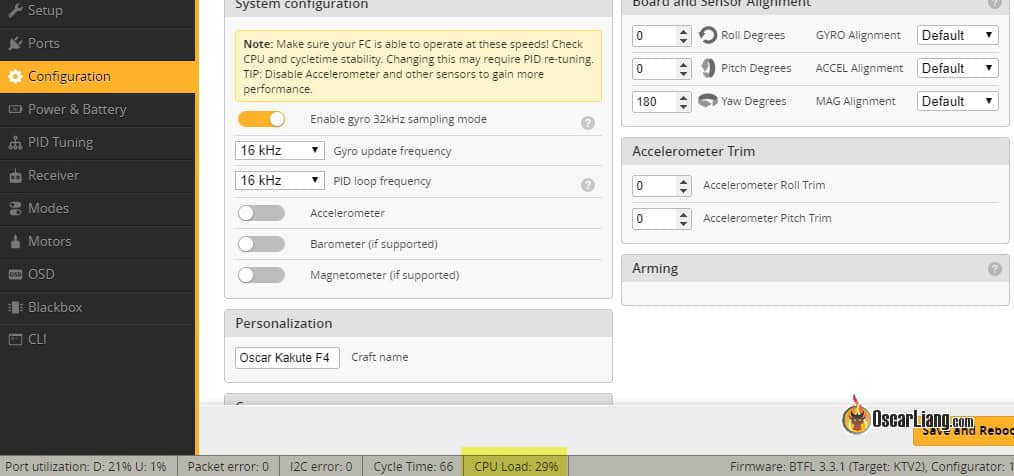
Accelerometer Points
If the Most Arm Angle in Configuration tab is about under 180 (default worth 25), your quad should be below this angle with a purpose to arm. In that case, guarantee your quad is on a stage floor, and calibrate the ACC on a stage floor.
If you want to have the ability to arm the drone regardless the angle it’s in, you possibly can disable Most Arm Angle by getting into 180. Some individuals choose to do that because it permits them to arm the quad when they’re caught in timber they usually may be capable to shake it out. However clearly this may very well be a security concern, so do that at your individual threat.
A defective accelerometer might additionally contribute to the problem, attempt disabling accelerometer within the Configuration tab should you don’t usually fly in Angle/Horizon/Rescue modes.
CPU Utilization
When CPU load is just too excessive, Betaflight will refuse to arm. Yow will discover out the CPU load on the backside of Betaflight Configurator.
Preserve the CPU load under 80% (since BF4.3) by adjusting settings, equivalent to decreasing PID loop frequency, and disabling pointless options equivalent to LED and mushy serial.
Throttle Points
Guarantee your throttle is accurately calibrated. When your throttle channel’s lowest worth is just too excessive, Betaflight will refuse to arm. Ideally your channel endpoints ought to be 1000 and 2000. 10-12 under 1000 and above 2000 is often high-quality, equivalent to 988/990 – 2010-2012, however positively not above 1000 and under 2000, that’s unhealthy, during which case you may wish to calibrate your radio endpoints.
Betaflight doesn’t arm in case your minimal throttle is just too excessive (larger than the setting “Min_Check”). It is a security characteristic in order that the quad doesn’t instantly spin up the motors and damage you when it’s armed. It’s essential to be sure that your throttle is decrease than min_check when it’s within the lowest stick place. Min_Check is 1050 by default.
Moron threshold
Some FC might need extra delicate gyro’s and the drone would refuse to calibrate and initialize after energy up, and due to this fact you possibly can’t arm it. By improve “gyro_calib_noise_limit” (initially generally known as Moron Threshold) in CLI can scale back gyro sensitivity throughout initialization. Attempt setting it to 100 and even 120.
Conclusion
I hope you discovered this information useful! Let me know within the remark in case your arming downside was attributable to one thing else that wasn’t coated on this tutorial. If you’re nonetheless having issues arming your quad after following this information, please publish your query on our discussion board, our neighborhood is at all times right here to assist and be taught collectively. Glad flying!
Edit Historical past
- Jun 2018 – Tutorial created.
- Feb 2024 – Up to date.